Portfolio
Surjyatapa Ray Choudhury
Tango as Toolpath
Obuchi Lab | The University of Tokyo
Studio research project
2019
Surjyatapa Ray, Campbell Argenzio
This project is an investigation into how we might observe human bodies moving systematically in 3D space, break it down into steps, optimize it and reprogram or guide the bodies in motion according to desired outcomes. In this case we used Tango to design 3D, woven “canopy” structures. We explore the use of off-the-shelf hardware like smartphone cameras, simple analysis methods like HSV tracking, and seeing old human behaviors with new eyes in order to utilize them in a digital fabrication process.
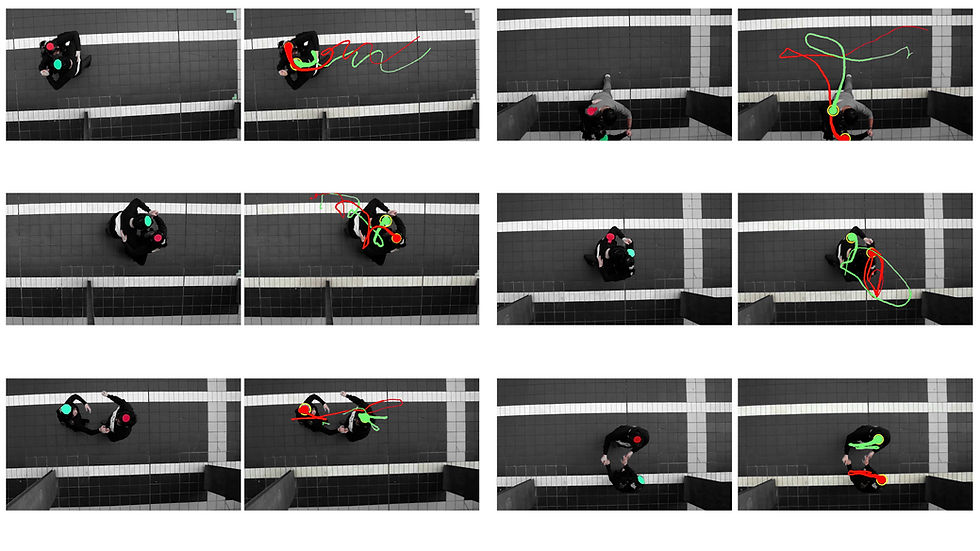
The growing ubiquity of computer vision enables even architects to find clever ways of capturing and analyzing human behaviour like never before. As they Tango (or Salsa, or Milonga) each dancer wears a HSV (Hue, Saturation, Value) tracker on their body that is visible at all times. Filming from above, a static camera records the dance in real time, picking up the moving HSV tracker. Optimizations are run, and new instruction can be given to the dancers to change the geometry.
Project Details


Tango encourages improvisation in a unique way compared to other partnered dances. Tango is considered a language “which can be understood, taught, learned, and used to convey intentions, feelings, musicality, and movement traits such as step type, size, variation, direction, speed, suspension, pause, etc.” This aspect of reactionary improvisation facilitated by a shared knowledge of dance movements or “language” made Tango an ideal movement practice for our experiment. Source: Nicanor M. Lima. (1916); Adapted by Authors

In our system the Tango dancer is the tool path. We wanted to exploit the partnered aspect of Tango by imagining an additive process that consists of two tensile members being joined strategically. With a Wearable Device like a spool on their back, the dancers would tangle their rope periodically in order to add a “knot” to the weaving.

We did not design any ideal outcome. Part of our exploration was to see what kind of geometries emerged and then optimize them to be a “canopy” form. To do so we found each intersection of the two ropes and added a knot, indicated here as a white square. Even with hundreds of knots, the resulting tensile geometries were stubbornly trailing and tendril-like, almost like a jellyfish. In order to create a canopy like form, we introduced anchor points to the system. All anchors would be attached at the same height. The anchors are indicated here as a black arrow.
Tango encourages improvisation in a unique way compared to other partnered dances. Tango is considered a language “which can be understood, taught, learned, and used to convey intentions, feelings, musicality, and movement traits such as step type, size, variation, direction, speed, suspension, pause, etc.” This aspect of reactionary improvisation facilitated by a shared knowledge of dance movements or “language” made Tango an ideal movement practice for our experiment. Source: Nicanor M. Lima. (1916); Adapted by Authors
This process of generating form out of systemized movement was an exploratory step for us in working outside the current paradigm of typical Digital Fabrication processes. We did so to gain some understanding in how we may develop different methods of digital construction using accessible technology. This form exploration led us to question methods of communication not just between the two partners dancing, but between the dancers and the digital system itself. The optimization program generates feedback for the participants and influences their movements. This two-way communication could lead to a higher level of collaboration between fabrication agents and the computer. Emergent forms derived from such non-linear real-time communication push the limit of current practices of digital fabrication.
Project Gallery

